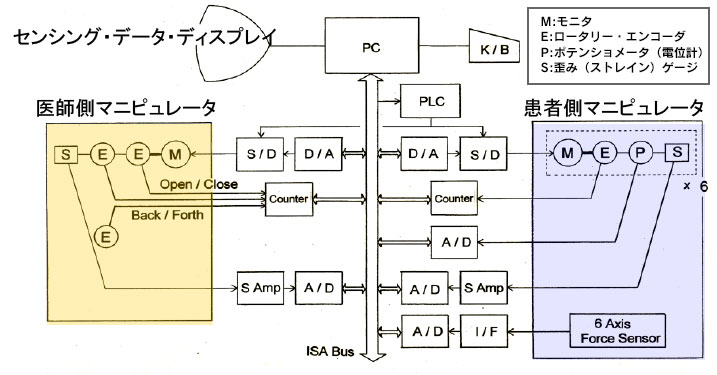
ロボット開発事例 – 顎運動訓練ロボット 臨床治療状況 早稲田大学様、山梨医科大学様(現 山梨大学医学部)にて臨床治療を行いました。 実際の下顎運動機能障害症例について、木製開口器を使用して、荷重と開口距離との関係を検討し、予備実験の結果から開口開大力を計測しました。 制御システム構成概要(クリックで拡大) 制御システム構成の概要図です。(異構造・異自由度マスタースレーブマニピュレータ) 基本動作の動画です。患者側のマニピュレータ(6軸パラレル機構)です。 実際の使用イメージ動画です。開閉口動作。 コンプライアンス制御の動画です。